





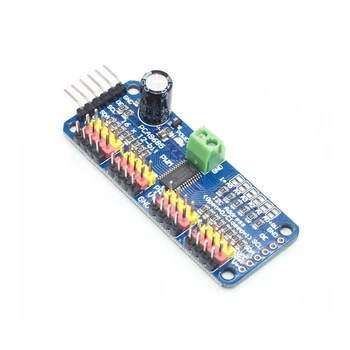







Açıklama: Bir hexapod yürüteç yapmak ister misiniz?Belki tonlarca hareketli parça ile bir sanat eseri yapıyorsunuz ya da hassas PWM çıkışına sahip bir ton LED sürmeniz gerekiyor.Mikrodenetleyicinizin sınırlı sayıda PWM çıkışı vardır ve kendinizi tükenirken bulursunuz!Adafruit 16 Kanallı 12 bit PWM/Servo Sürücü-I2C arayüzü ile değil.Bu pwm ve servo sürücü koparma ile, sadece iki pim ile 16 serbest çalışan PWM çıkışını kontrol edebilirsiniz!16'dan fazla PWM çıkışı çalıştırmanız mı gerekiyor?Sorun değil.Olağanüstü bir 992 PWM çıkışına kadar bu güzelliklerin 62'sine kadar zincirleyin.Özellikler: Boyutlar (başlık veya terminal bloğu yok) 2.5" x 1 "x 0.1" (62.5 mm x 25.4 mm x 3mm) Ağırlık (başlık veya terminal bloğu yok): 5.5 gram Ağırlık (3x4 başlık ve terminal bloğu ile): 9 gram Bu kart/çip, aralarında I2C 7 bit adres kullanır. 0x60-0x80, güç girişi için jumper Terminal bloğu ile seçilebilir (veya yan taraftaki 0.1" kesmeleri kullanabilirsiniz) Terminal bloğu girişindeki ters polarite koruması Yeşil güç-iyi LED 4'lü gruplar halinde 3 pinli konektörler, böylece aynı anda 16 servo takabilirsiniz (Servo fişleri biraz daha geniştir 0.1" den daha fazla, böylece sadece 0.1" başlıkta yan yana 4 istifleyebilirsiniz "Zincirlenebilir" V+ hattına büyük bir kapasitör yerleştirmek için bir nokta tasarlayın (ihtiyacınız olması durumunda) Tüm çıkış hatlarına 220 ohm serisi dirençler onları korumak ve sürüş LED'leri yapmak için yerleşik bir saate sahip 6 adres seçme pimi ı2c kontrollü PWM sürücüsü için önemsiz Lehim jumperları.TLC5940 ailesinin aksine, mikrodenetleyicinizi bağlayarak sürekli olarak sinyal göndermenize gerek yoktur, tamamen ücretsiz çalışır!5V uyumludur, bu da onu 3.3 V mikrodenetleyiciden kontrol edebileceğiniz ve yine de 6V çıkışa kadar güvenli bir şekilde sürebileceğiniz anlamına gelir (bu, 3.4+ ileri voltajlı beyaz veya mavi LED'leri kontrol etmek istediğinizde iyidir) 6 adres seçme pimi, böylece bunlardan 62 tanesini tek bir kabloya bağlayabilirsiniz. ı2c veriyolu, toplam 992 çıkış-bu çok sayıda servo veya LED Ayarlanabilir frekans PWM Her çıkış için yaklaşık 1,6 kHz'e kadar 12 bit çözünürlük-servolar için bu, 60hz'de yaklaşık 4us çözünürlük anlamına gelir güncelleme oranı Yapılandırılabilir itme-çekme veya açma-boşaltma çıkışı Çıkış, pimin hızlı bir şekilde devre dışı bırakılmasını sağlar tüm çıkışlar Kullanım talimatları:
(1)Arduino'ya bağlı sürücü kartı: PWM sürücü kartı I2C yöntemini kullanır, bu nedenle Arduino cihazına sadece dört satır bağlanabilir:" Klasik " Arduino pin modu: + 5v - > VCC GND - > GND Analog 4 - > SDA Analog 5 - > SCL Eski Mega pin yolu: + 5 v - > VCC GND - > GND Dijital 20 - > SDA Dijital 21 - > SCL R3 ve üstü Arduino pin yöntemi (Uno, Mega ve Leonardo): (Bu panolar özel SDA ve SCL pinlerine sahiptir) + 5 v- > VCC GND - > GND SDA - > SDA SCL - > SCL VCC pin çip güç kaynağı için sadece olduğunu, servo veya LED ışıkları bağlamak istiyorsanız, V + pin güç kaynağı kullanın, V + pin 3.3 ~ 6 V güç kaynağı destekler (çip güvenli gerilim 5 V). güç kaynağı terminali üzerinden harici güç kaynağı bağlamak için tavsiye edilir. (2) güç kaynağı parçası: Servo tasarım voltajının çoğu, özellikle aynı anda çalışan bir dizi direksiyon dişlisinde, yüksek güçlü güç kaynağına ihtiyaç duyularak 5 ~ 6v'dir.Servoya doğrudan güç sağlamak için doğrudan Arduino 5V pinini kullanıyorsanız, öngörülemeyen bazı sorunlar vardır, bu nedenle sürücü kartı için uygun bir harici güç kaynağınız olmasını öneririz. (3) Servoyu bağlayın: Çoğu servo, ilgili pim üzerindeki sürücü kartına yerleştirildiği sürece standart 3 telli dişi fişler kullanılarak bağlanır. (Topraklama kablosu genellikle siyah veya kahverengidir, sinyal hattı genellikle sarı veya beyazdır) (4) sürücü kartı atanan adres için: Kaskadın her sürücü kartının benzersiz bir erişim adresine sahip olması gerekir.Her sürücü kartının ilk I2C adresi 0 × 40'tır, jumper I2C adresinin sağ üst köşesini değiştirebilirsiniz."1"ikili sayısını belirtmek için lehimli bir jumper bağlayın.Yönetim Kurulu 0: Adres = 0x40 Ofset = ikili 00000 (varsayılan) Yönetim Kurulu 1: Adres = 0x41 Ofset = ikili 00001 (yukarıda gösterildiği gibi, A0'a bağlı) Yönetim Kurulu 2: Adres = 0x42 Ofset = ikili 00010 (A1'e bağlanın) Yönetim Kurulu 3: Adres = 0x43 Ofset = ikili 00011 (A0'a bağlanın ve A1) Yönetim Kurulu 4: Adres = 0x44 Ofset = ikili 00100 (A2'ye bağlanın) Vb. . .Kod örneği: # include # include Adafruit_PWMServoDriver pwm1 = Adafruit_PWMServoDriver (0 × 40); Adafruit_PWMServoDriver pwm2 = Adafruit_PWMServoDriver (0x41); Geçersiz kurulum () { Seri.başlangıç (9600); Seri.println ("16 kanal PWM testi! "); Pwm1.begın (); Pwm1.setPWMFreq (1600); / / Bu maksimum PWM frekansı Pwm2'dir.begın (); Pwm2.setPWMFreq (1600); / / Bu maksimum PWM frekansıdır









Copyright © 2024 Tasarım ve Geliştirme www.ulusanmotor.com.tr







